本文系统介绍了k近邻(k-Nearest Neighbors, kNN)搜索算法,从精确方法到近似最近邻搜索(Approximate Nearest Neighbor Search, ANNS)技术,深入剖析了维度灾难(Curse of Dimensionality)的数学本质,并详解了局部敏感哈希(Locality Sensitive Hashing, LSH)、乘积量化(Product Quantization, PQ)及基于图的层次可导航小世界图(Hierarchical Navigable Small World, HNSW)等现代解决方案的原理与权衡。
kNN
给定一个包含 n 个点的数据集 P = {p_1, p_2, \dots, p_n} 和一个查询点 q ,最近邻查询问题旨在找到 P 中与 q 距离最近的 k 个点。距离通常通过某种度量函数 d(p, q) 来衡量,例如欧几里得距离或余弦相似度。
朴素算法
对于每一个查询点 q ,算法会计算 q 与数据集中所有 n 个点 p_i 之间的距离 d(q, p_i) 。然后,将这些距离按升序排序,并选择前 k 个点作为结果。 O(1) 预处理,若计算度量需要 O(D) ,那么复杂度为 O(n \cdot D + n \log k)=O(n \cdot D) ,这里通常 D 比 \log k 大。
k -d Tree
构建:所有点中选择一个维度,找到该维度上的中位数作为分割点,将数据集分为两部分。然后对每个子集递归地在下一个维度上进行分割,直到每个叶节点包含足够少的点。复杂度 O(n \cdot D \log n) 。
查询:从根开始根据查询点 q 的坐标与当前节点的分割维度和分割值进入左右子树,找到一个初始的最近邻,然后在回溯的过程中计算当前节点到查询点 q 的距离,并更新当前找到的 k 个最近邻列表,根据到超平面的距离来决定是否进入其他子树查找。低维数据中复杂度为 O(D \log n) ,在高维数据中,由于维度灾难,剪枝效率大幅下降,几乎所有子树都需要访问,查询时间会退化到接近 O(n \cdot D) 。
Ball Tree
为了缓解维度灾难,相比 k -d Tree 用立方体作为节点,Ball Tree 将点集包裹在超球体中来分割空间:每个节点代表一个包含其所有子节点和点的超球体。构建时递归地将超球体内的点集分为两个子集,并为每个子集创建更小的超球体,直到叶节点。
查询: 类似 k -d Tree,根据查询点 q 到超球体中心和边界的距离,来判断是否需要进入某个子树。比 k -d Tree 在中高维度快很多,但是本质上仍受维度灾难影响,在高维下也接近 O(n \cdot D) 。
维度灾难
k -d树性能的退化现象是“维度灾难”(Curse of Dimensionality, CoD)的直接体现。维度灾难描述了当数据的特征维度 D 增加时,许多在低维空间中成立的几何和统计特性开始失效,导致数据分布和异质性变得更加复杂和反直觉。这种现象不仅影响了数据索引结构,也造成了回归、分类或聚类模型的性能下降。
空间稀疏性
一个经典例子是比较 D 维单位超立方体 C_D = [-1, 1]^D 和其内切单位超球体 B_D(1) (半径 R=1 )的体积行为 5。超立方体的体积 V_{\text{cube}} = 2^D 随维度呈指数级增长。相比之下, D 维单位超球体的体积 V_D 表达式为:
V_D = \frac{\pi^{D/2}}{\Gamma(D/2+1)}其中 \Gamma 是伽马函数 5。通过斯特林公式对 \Gamma(D/2+1) 进行计算,可以得出数学结论:随着维度 D \to \infty ,单位超球体的体积 V_D 将非常迅速地趋近于零。这意味着在高维空间中,超立方体的绝大部分体积都被“掏空”了。如果数据点 n 在超立方体内均匀分布,那么数据点密度 n/V_{\text{cube}} 将以 1/2^D 的速度急剧下降,造成极度的数据稀疏性。在高维空间中,任何两个数据点之间都会被巨大的空旷空间所分离。
体积集中化
高维几何体还有一个反直觉的特性,即体积的集中化:
- 超球体体积集中在表面 (Surface Concentration):对于一个半径为 R 的 D 维超球体,其绝大部分体积集中在一个厚度与 R/D 成比例的表面“壳”(rind/annulus)内。
- 超立方体体积集中在角落 (Corner Concentration): D 维单位超立方体的体积大多位于其 2^D 个角落附近。
这种几何特性对 k -d 树的构建产生了直接的负面影响。 k -d 树采用轴对齐分割,本质上是在超立方体空间内进行划分。然而,由于高维数据的内在分布往往倾向于集中在一个低维流形上(Manifold Effect)或集中在超球体的表面,这种轴对齐划分无法有效地适应数据的真实几何结构。
距离集中化
在高维空间中,任意点 q 到数据集中所有点 p_i 的距离都趋向于聚集在平均距离附近。
对于一个点 q ,我们关注其最近邻距离 d_{NN}(q) 和最远邻距离 d_{FN}(q) 。对于服从特定分布(如高斯分布或均匀分布)的高维数据集,可以证明这两个距离的比率趋近于 1 :
\lim_{D \to \infty} \frac{d_{NN}(q)}{d_{FN}(q)} = 1这种数学上的收敛意味着:
- 查询点 q 看起来与数据集中的所有点几乎保持相同的距离。
-
距离度量的方差 \text{Var}(d(p, q)) 相比其期望 \text E[d(p, q)] 变得微不足道。
k -d 树的剪枝机制是基于分枝定界策略,其核心在于找到一个足够小的当前最佳距离 \epsilon (即当前 k 个最近邻中的最远距离)。剪枝条件要求待考察子树到查询点 q 的最小距离 d_{\min} 必须大于 \epsilon ,才能安全地跳过该子树。
距离集中化对这个机制造成了致命打击:由于 d_{NN} \approx d_{FN} ,当前最佳距离 \epsilon 即使是最小的距离,也已经膨胀到一个较大的值,接近于所有点的平均距离 d_{\text{avg}} 。这意味着几乎所有子区域到查询点 q 的最小距离 d_{\min} 都极有可能小于或等于这个已经膨胀的 \epsilon 。因此,剪枝条件 d_{\min} > \epsilon 几乎永远无法满足,导致算法必须继续探索几乎所有的分支。这时候 k -d 树最坏情况时间复杂度 T_{\text{worst}} 在计算几何中达到了经典的界限:
\lim_{D \to \infty} T_{\text{worst}} = \lim_{D \to \infty} O\left(D \cdot n^{1-\frac{1}{D}}\right)在实际应用中,存在一个经验法则:为了保证 k -d 树的查询效率优于线性搜索,数据集大小 n 必须远大于 2^D ( n \gg 2^D )。
ANNS
因此,近似 kNN 算法应运而生。kANN 算法(也叫ANNS)不保证找到的 k 个点是精确的最近邻,但它们与查询点足够“接近”,并且在可接受的精度损失下,能够显著提高查询速度和吞吐量。
Locality Sensitive Hashing, LSH
LSH 核心思想是设计一组哈希函数族,使得相似的点以高概率哈希到同一个桶中,而不相似的点以低概率哈希到同一个桶中。具体地,设 \mathcal{X} 是一个数据空间, d: \mathcal{X} \times \mathcal{X} \to \mathbb{R} 是一个距离度量。一个哈希函数族 \mathcal{H} 被称为 (r, c, p_1, p_2) -敏感的(其中 r > 0 , c > 1 , p_1 > p_2 ),如果对于任意两个点 x, y \in \mathcal{X} ,满足:
- 如果 d(x, y) \leq r ,则 \Pr[h(x) = h(y)] \geq p_1 。
- 如果 d(x, y) \geq c r ,则 \Pr[h(x) = h(y)] \leq p_2 。
这里, p_1 和 p_2 是概率值,分别表示在“近”和“远”距离下哈希碰撞的概率。理想情况下, p_1 接近 1, p_2 接近 0,这样哈希函数能有效区分相似和不相似的点。
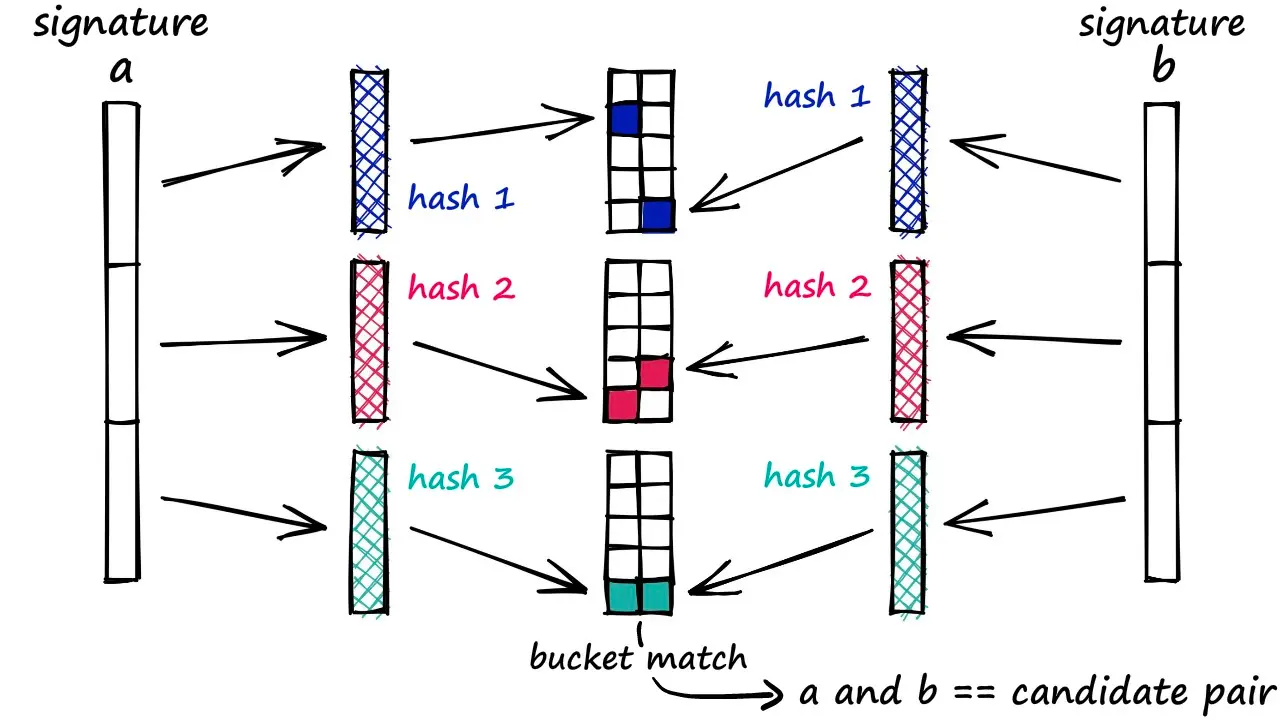
为了增强性能,LSH 通常使用多个哈希函数和多个哈希表,每个哈希表使用一个复合哈希函数 g(x) = (h_1(x), h_2(x), \dots, h_k(x)) ,其中 h_i 是从 \mathcal{H} 中独立随机选取的哈希函数。 g(x) 将点映射到一个 k -维哈希码,对应一个哈希桶。然后 LSH 使用 L 个这样的复合哈希函数,构建 L 个独立的哈希表。
构建:LSH 选择哈希函数族 \mathcal{H} 和每个复合哈希函数的哈希函数数量 k 和哈希表数量 L 。对于每个哈希表 j = 1, \dots, L ,生成一个复合哈希函数 g_j(x) = (h_{j,1}(x), h_{j,2}(x), \dots, h_{j,k}(x)) ,其中 h_{j,i} \sim \mathcal{H} 。对于数据集中的每个点 p_i ,计算 g_j(p_i) 并将其插入到第 j 个哈希表的对应桶中。复杂度为 O(n \cdot L \cdot k \cdot D) ,其中 n 是数据集大小, k 通常和 L 与 n 相关。
查询:对于查询点 q ,我们计算所有 L 个复合哈希值 g_j(q) 。对于每个 j ,检索第 j 个哈希表中与 g_j(q) 对应的桶中的所有点加入候选集。对候选集中的点计算精确距离 d(q, p) ,并返回最近邻或 top- k 近邻。记 B 为平均桶大小,复杂度为:计算哈希值 O(L \cdot k \cdot D) 、检索桶 O(L \cdot B) 、精确计算 O(L \cdot B \cdot D) ,总时间为 O(L \cdot B \cdot D) ,通常认为查询时间亚线性( O(n^\rho) )。
常见距离度量对应的 LSH 哈希函数:
-
欧氏距离(L2距离):基于 p -稳定分布,将哈希函数定义为: h_{\mathbf{a}, b}(x) = \left\lfloor \frac{\mathbf{a} \cdot x + b}{w} \right\rfloor ,其中: \mathbf{a} 是一个随机向量,其分量来自标准正态分布 N(0,1) , b 是一个在区间 [0, w] 上均匀分布的随机偏移, w 是桶宽参数,控制哈希桶的大小。
碰撞概率:对于两个点 x 和 y ,设 d = |x - y|_2 ,则:
\Pr[h(x) = h(y)] = \int_0^w \frac{1}{d} f\left(\frac{t}{d}\right) \left(1 - \frac{t}{w}\right) \, dt其中 f 是 p -稳定分布的概率密度函数。
对于欧氏距离,这可以近似为 \Pr[h(x) = h(y)] \approx 1 - 2\Phi(-w/d) - \frac{2}{\sqrt{2\pi} d/w} (1 - e^{-(d/w)^2 / 2}) ,其中 \Phi 是标准正态累积分布函数。参数 w 通常通过实验调整, k 和 L 根据期望的召回率设置。
-
余弦相似度:基于随机超平面,将哈希函数定义为: h_{\mathbf{a}}(x) = \text{sign}(\mathbf{a} \cdot x) ,其中 \mathbf{a} 是一个随机向量,其分量来自标准正态分布 N(0,1) 。
碰撞概率:对于两个点 x 和 y ,设 \theta 是它们之间的夹角,则: \Pr[h(x) = h(y)] = 1 - \frac{\theta}{\pi} 。因为 \text{sign}(\mathbf{a} \cdot x) = \text{sign}(\mathbf{a} \cdot y) 当且仅当 \mathbf{a} 与 x 和 y 的夹角相同侧。余弦相似度 \sim \cos \theta ,所以碰撞概率与相似度正相关。
Product Quantization, PQ
PQ 是一种用于高维向量压缩和近似最近邻搜索的技术,其核心数学思想是将高维空间分解为多个低维子空间的笛卡尔积,并对每个子空间独立进行向量量化。这种分解允许我们以紧凑的方式表示向量,同时支持高效的近似距离计算。

给定一个 D 维向量 \mathbf{x} \in \mathbb{R}^D ,PQ 首先将其划分为 M 个互不相交的子向量,即 \mathbf{x} = [\mathbf{x}_1, \mathbf{x}_2, \dots, \mathbf{x}_M] ,其中每个子向量 \mathbf{x}_m 的维度为 D/M (假设 D 能被 M 整除)。这种划分相当于将原始向量空间视为 M 个子空间的直积,从而将高维量化问题分解为多个低维量化问题。对于每个子空间 m ,我们使用 k-means 生成一个码本 \mathcal{C}_m = {\mathbf{c}_{m,1}, \mathbf{c}_{m,2}, \dots, \mathbf{c}_{m,C}} ,其中 \mathbf{c}_{m,i} \in \mathbb{R}^{D/M} 是码字, C 是码本大小。码本的训练过程旨在最小化量化误差,即找到一组码字使得子向量到最近码字的平均距离最小化。
构建:对于数据集中的每个向量 \mathbf{x} ,我们对其进行编码。对于每个子向量 \mathbf{x}_m ,我们找到其最近的码字: q_m(\mathbf{x}_m) = \arg\min_{\mathbf{c} \in \mathcal{C}_m} |\mathbf{x}_m - \mathbf{c}| ,并记录对应的索引 i_m(\mathbf{x}) = \arg\min_{i=1,\dots,C} |\mathbf{x}_m - \mathbf{c}_{m,i}| 。最终,整个向量 \mathbf{x} 被量化为 q(\mathbf{x}) = [q_1(\mathbf{x}_1), q_2(\mathbf{x}_2), \dots, q_M(\mathbf{x}_M)] ,其存储表示是一个由 M 个整数组成的元组 (i_1, i_2, \dots, i_M) ,总存储空间为 M \cdot \log_2 C 位。例如,当 M=8 和 C=256 时,每个向量仅需 64 位,相比原始浮点表示(如 128 维需 512 字节)极大地压缩了存储。复杂度主要开销来自 k-means 聚类 O(K \cdot D \cdot n \cdot T) 和 PQ 编码 O(n \cdot D \cdot C) 。
查询:给定一个查询向量 \mathbf{q} ,我们需要快速计算它与数据库中压缩向量的近似距离。PQ 支持两种主要距离计算方式:非对称距离计算 (ADC) 和对称距离计算 (SDC):
- 在 ADC 中,我们首先将 \mathbf{q} 同样划分为 M 个子向量 \mathbf{q}_m 。然后,对于每个子空间 m ,我们预先计算查询子向量与所有码字的距离,形成距离表 \text{table}_m[i] = d(\mathbf{q}_m, \mathbf{c}_{m,i}) ,其中 d(\cdot,\cdot) 是距离度量。对于数据库中的每个压缩向量 \mathbf{x} ,其近似距离通过查表求和得到: \hat{d}(\mathbf{q}, \mathbf{x}) = \sum_{m=1}^M \text{table}_m[i_m(\mathbf{x})] 。
- SDC 要求查询向量也被量化,即计算 d(\mathbf{q}, \mathbf{x}) \approx \sum_{m=1}^M d(\mathbf{c}_{m,j_m(\mathbf{q})}, \mathbf{c}_{m,i_m(\mathbf{x})}) ,其中 j_m(\mathbf{q}) 是 \mathbf{q} 的量化索引。但由于查询向量的量化引入额外误差,SDC 的精度通常低于 ADC。
空间复杂度方面,原始数据存储为 O(n \cdot D) ,而 PQ 压缩后仅需 O(n \cdot M \cdot \log_2 C) 位用于存储编码,加上码本存储 O(M \cdot C \cdot \frac{D}{M}) = O(C \cdot D) 。这使得 PQ 非常适用于大规模数据集。
PQ 是一种有损压缩方法,其核心误差源于量化过程。量化误差可以定义为 \mathcal{E} = \mathbb{E}[|\mathbf{x} - q(\mathbf{x})|^2] ,即原始向量与量化向量之间的均方误差。对于子向量维度 D/M ,量化误差满足 \mathcal{E} \geq M \cdot C^{-2/(D/M)} \cdot \sigma^2 ,其中 \sigma^2 是子向量的方差。这表明,为了减少误差,我们可以增加码本大小 C 或子空间数量 M ,但这会增加存储和计算成本。
倒排文件索引 IVF
为了进一步提升搜索效率,PQ 常与倒排文件索引结合,形成 IVF-PQ 框架。IVF 首先使用 k-means 将整个数据集聚类成 K 个簇,每个簇对应一个质心 \mathbf{r}_k 和一个 Voronoi 胞腔 V_k 。在构建索引时,每个数据点被分配到最近质心的簇中,并在簇内使用 PQ 进行压缩。
在查询时,对于查询向量 \mathbf{q} ,我们首先找到 w 个最近质心(即 w 个最近簇),然后只在这些簇内进行搜索。距离计算结合了粗搜索和细搜索:首先计算 \mathbf{q} 与质心的距离以确定候选簇,然后在候选簇内使用 PQ-ADC 计算近似距离。这种方法将搜索范围从整个数据集缩小到局部区域,显著减少了计算量。数学上,搜索召回率取决于 P(\mathbf{x}^* \in \bigcup_{k \in \mathcal{N}_w(\mathbf{q})} V_k) ,即真实近邻落在候选簇内的概率。
基于图的方法
这类方法构建一个图,其中数据点是节点,边连接“相似”或“邻近”的点。搜索过程通过遍历图来找到查询点的近似最近邻。搜索算法通常直接使用贪心搜索,而建图则非常关键。
贪心搜索
维护候选列表 L 和已访问集合 V 。
从随机的/中心点作为起始点 s ,每次从 L \setminus V (未扩展的候选点)中选择距离查询点 q 最近的点 p^* = \arg\min_{p \in L \setminus V} d(q, p) 。选择 p^* 后,算法将其所有出边邻居 N(p^*) 添加到候选列表 L 中,并将 p^* 标记为已访问(加入 V )。这个过程不断重复,直到满足停止条件:可能达到最大迭代次数、 L \setminus V 为空、或者候选列表大小达到预设阈值 L_{max} 。最终从候选列表 L 中返回 k 个距离 q 最近的点作为近似最近邻。
贪心搜索的时间复杂度高度依赖于图的结构质量。在一个良好构造的图中,搜索路径长度通常为 O(\log n) 或 O(\log^2 n) ,其中 n 是数据集大小。这使得查询时间远低于线性扫描的 O(n \cdot D) 。图的质量衡量标准包括图的直径和平均出度,这些因素共同决定了搜索效率。通常我们认为建出来的图应该具有下面性质:
- 稀疏性 Sparsity:图的边数通常远小于 O(n^2) 。每个节点只连接少数邻居(平均度数 R 通常是一个常数或一个小常数),以控制索引大小和查询时的距离计算量。
- 连通性 Connectivity:图必须足够连通,以确保从任意起始点都能找到通往查询目标区域的路径。
- 小世界特性 Small-World Property:理想的图应具有较小的直径,即任意两点之间的最短路径(跳数)很短。这对于减少磁盘 I/O 或内存访问次数至关重要。
- 可导航性 Navigability:图应该支持贪心搜索。这意味着在每一步,沿着图的边总能找到一个比当前点更接近查询点的邻居,或者至少能引导搜索走向正确的方向。这通常通过连接局部邻居(保证局部收敛)和长距离邻居(保证全局收敛和减小直径)来实现。
- 剪枝 Pruning:为了控制每个节点的度数并选择最有价值的邻居,构建算法通常会使用某种形式的剪枝策略。这有助于去除冗余边,同时保留对搜索至关重要的边。
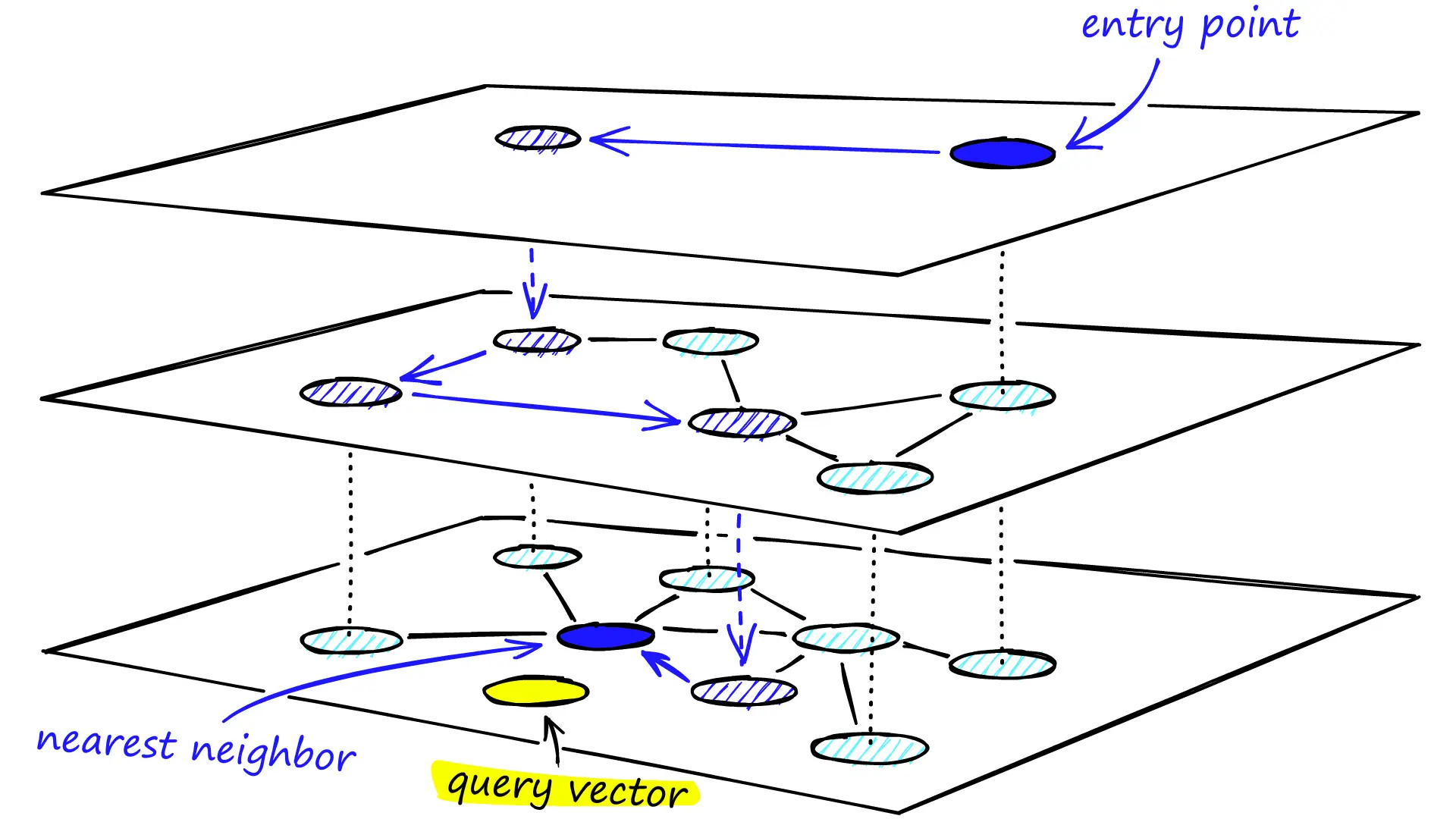
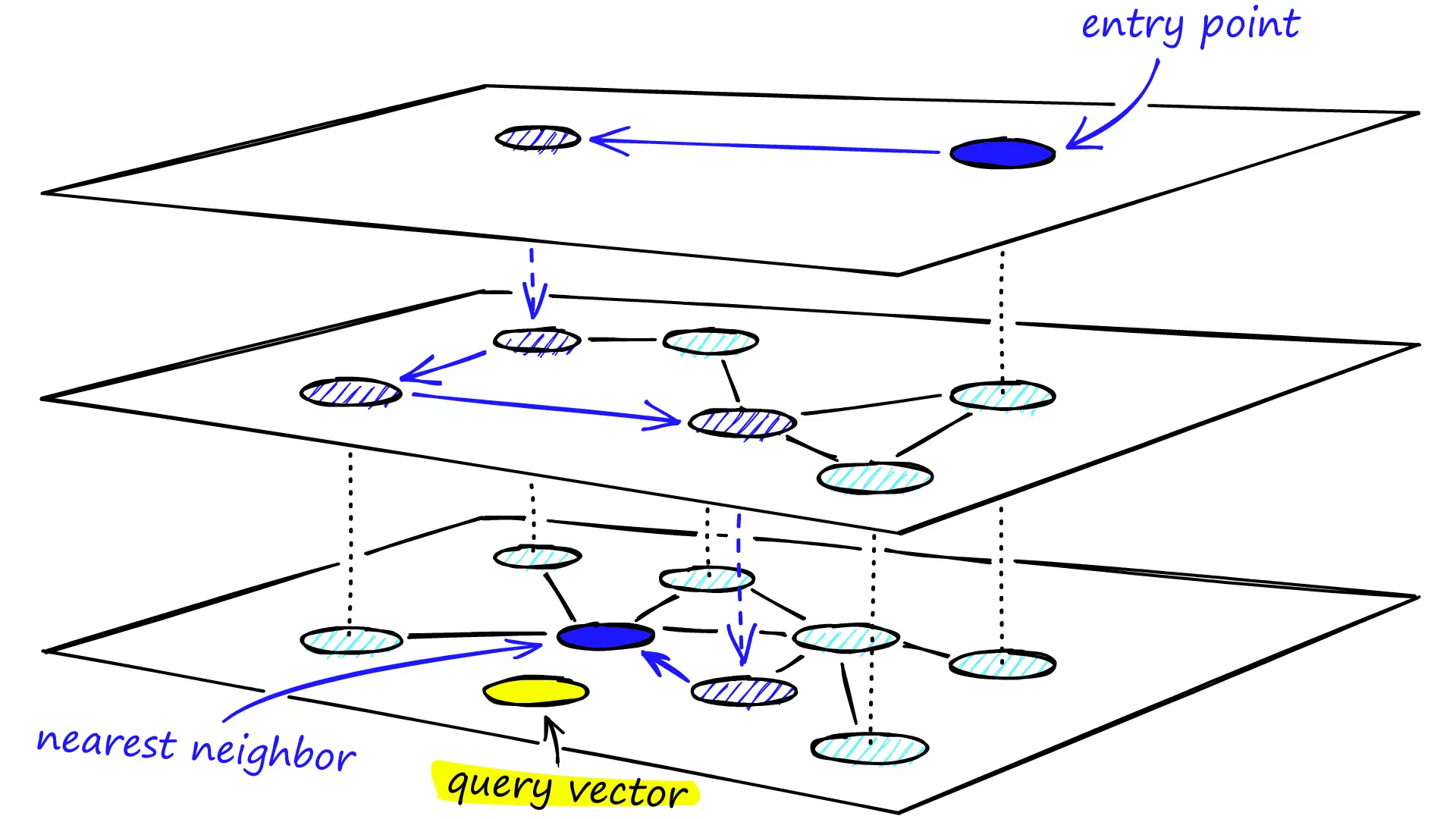
Hierarchical Navigable Small World, HNSW
HNSW 从概率跳表中得到灵感,核心思想是构建一个多层图结构,模仿“小世界网络”的特性,即大多数节点之间通过少数几跳即可到达。
具体地,HNSW 由 L_{max} 层组成,其中第 0 层包含所有数据集点,而更高层包含较少的点,作为“高速公路”连接远距离点。每一层 l 都是一个单独的图 G_l = (P_l, E_l) ,其中 P_l \subseteq P_{l-1} 。通常,一个点在层 l 的邻居集合是它在层 l-1 邻居集合的子集,但连接的“范围”更广。
构建过程:
-
当插入一个新点 p_{new} 时,首先通过随机过程(通常是指数分布,例如 \min(-\ln(rand()), L) )为其分配一个最高层 l_{max} 。从最高层 L_{max} 开始,在当前层 l 通过贪心搜索查找查询点 p_{new} 的 efC 个近似最近邻。这里的 efC 是一个构建参数,表示在构建时用于探索的候选列表大小。
-
接下来在当前层 l 找到 efC 个最近邻后,将这些邻居作为下一层的入口点,并选择 M 个点与 p_{new} 连接,重复步骤,逐层向下,直到最低层 l=0 。
连接和剪枝 Pruning:使用一种启发式剪枝策略来选择这 M 个邻居。通常,它会选择 M 个离 p_{new} 最近的邻居,并确保这些邻居能提供良好的“扩展”能力,避免连接到被其他已连接邻居“遮蔽”的点。具体来说,它会选择与 p_{new} 距离最近的 M 个点,并倾向于选择那些距离其他已连接邻居更远的点,以保证多样性。同时对每个邻居 p_j ,如果 p_j 的度数超过 M_{max} ,则需要对 p_j 的邻居集合进行剪枝,以保持度数限制。
HNSW 需要一个全局入口点来启动搜索。通常,第一个插入的点被指定为最高层的所有入口点。之后插入的点的搜索会从这个入口点开始。
Vamana
且听下回分解
参考: