本文通过线段树来高效解决并发分析中动态维护偏序关系的难题。传统方法如向量时钟在处理非流式更新时,成本高昂( \mathcal O(nk) )且不支持高效删除。本文为每对线程链维护一个专门的数据结构,查询任意事件间的可达性被转化为一个高效的区间查询操作。
Key findings: 在具有少量链的 DAG 上,动态可达性问题可以被高效地归约为另一个基础问题——动态后缀最小值问题。
背景
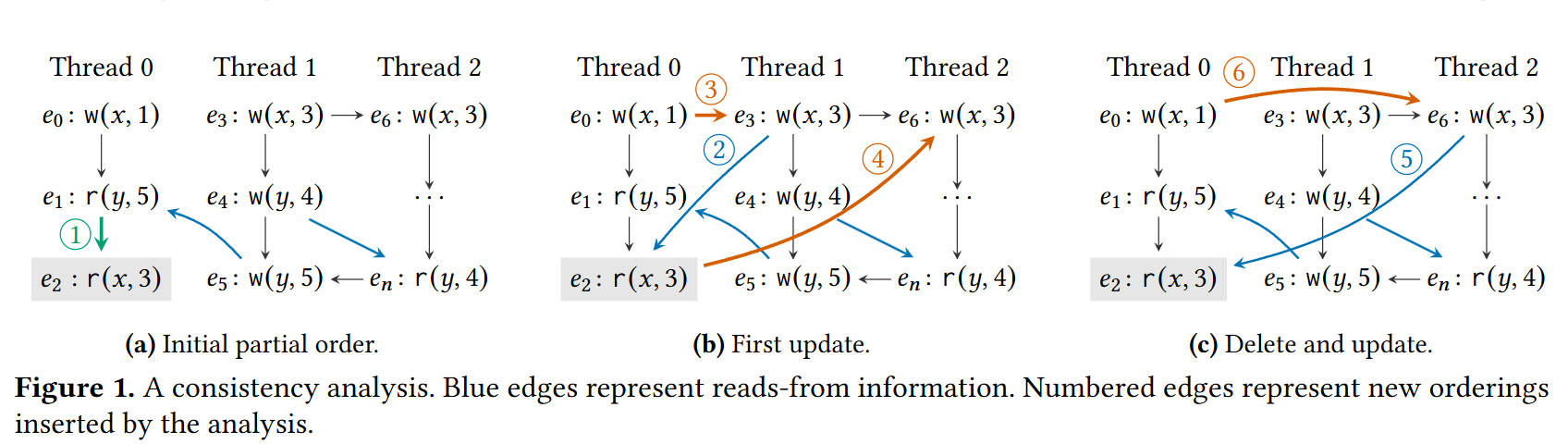
动态分析是分析和测试并发程序的常用方法。这类技术通过观察程序执行轨迹 \sigma ,并分析其中事件的依赖关系,以推断是否存在并发错误。核心在于维护一个表示这些事件依赖关系的偏序 P 。传统上,Vector Clocks (VCs) 是处理此类任务的标准数据结构。然而,VCs 在非流式(non-streaming)分析中效率低下,插入(和传播)每个新的偏序关系需要 \mathcal O(nk) 时间,其中 n 是轨迹的事件总数, k 是线程数。此外,VCs 无法高效处理现有偏序关系的删除操作,通常需要 \mathcal O(n^2) 时间重新计算。
CSSTs 概述
CSSTs 核心是为解决后缀最小值问题而设计的稀疏线段树(Sparse Segment Tree, SST)。设计利用了并发轨迹的两个关键特性:
- 并发轨迹通常由少量线程 k 组成。
- 偏序 P 通常包含 k 个全序链(或者数量与 k 成比例)。 在并发程序分析中, k 通常远小于 n 。
CSSTs 的主要目标是在此背景下,实现插入、删除和查询偏序关系操作的 \log 时间复杂度。具体地,CSSTs 进行了两项关键优化:
- Sparse Tree Representation: 仅为存在依赖关系的区间创建节点,使树的高度和操作复杂度同时受限于 \log n 和跨链密度 d ,即 \mathcal O(\min(\log n,d)) 。(看着很像动态开点?)
- Minima Indexing: 节点额外记录最小值的位置,允许后缀查询提前终止遍历,加速查询。
基于 SST,CSSTs 提供了两种工作模式:
- Fully Dynamic:支持边的插入与删除。每个 SST 仅存储直接依赖,查询时通过一个 \mathcal O(k^3) 的不动点计算来推导传递关系,更新开销低至 \mathcal O(\log n) 级别。
- Incremental:仅支持边插入。每个 SST 维护完整的传递可达性,更新时以 \mathcal O(k^2) 的代价传播依赖,将查询简化为一次 \mathcal O(\min(\log n,d)) 的 SST 查询。
2 条链的做法
考虑一个包含 k=2 条链的链式DAG G 。每条链可以看作是一个线程的事件序列,事件按其在线程内的发生顺序排列。为了表示 G 中两条链 t_1 和 t_2 之间的偏序关系,CSSTs 维护 每个事件在其他链上的最早可达的事件ID。
具体地,令数组 A_{t_2 t_1} 存储的是从 \langle t_1, j_1 \rangle 或其在 t_1 上的后续事件,到链 t_2 的最早的直接可达事件的序列ID j_2 。如果 \langle t_1, j_1 \rangle 或其在 t_1 上的后续事件都不能直接到达链 t_2 上的任何事件,则 A_{t_2 t_1}[j_1] = \infty 。也就是:
A_{t_2 t_1}[j_1] = \min({j_2 : \langle t_1, j_1 \rangle \rightarrow \langle t_2, j_2 \rangle})这里 \min(\emptyset) = \infty 。
基于上述表示,以下三种基础查询操作可以表示为:
-
successor(⟨t1, j1⟩, t2):查询事件 \langle t_1, j_1 \rangle 在链 t_2 中最早的后继事件。相当于查询 A_{t_2 t_1} 后缀最小值: \min(A_{t_2 t_1}, j_1) 。
-
predecessor(⟨t2, j2⟩, t1):查询事件 \langle t_2, j_2 \rangle 在链 t_1 中最晚的前驱事件。相当于找满足 A_{t_2 t_1}[i] \le j_2 的最大索引 i ,可以线段树上二分。
-
reachable(⟨t1, j1⟩, ⟨t2, j2⟩):查询事件 \langle t_1, j_1 \rangle 是否可达事件 \langle t_2, j_2 \rangle 。相当于查询是否有 \text{successor}(\langle t_1, j_1 \rangle, t_2) \le j_2 。
动态可达性要求能够高效地插入和删除边。为了维护 A_{t_2 t_1} ,CSSTs 引入了额外的辅助数据结构:
对于链 t_1 上的每一个事件 \langle t_1, j_1 \rangle ,维护一个小根堆 edgeHeap21[j1],存储所有从 \langle t_1, j_1 \rangle 直接指向链 t_2 的事件 \langle t_2, j_2 \rangle 的序列ID j_2 。这样,edgeHeap21[j1] 的堆顶就是从 \langle t_1, j_1 \rangle 直接到达链 t_2 的最早事件。
那么修改操作可以利用小根堆进行,插入和删除边就是在对应的小根堆中插入删除元素。然后只需要更新堆顶到线段树就好了。
通用的做法
当 k > 2 时,仅仅维护 k(k-1) 个 A_{t_2 t_1} 数组并不能直接解决问题。这是因为可达性可能通过多个中间链进行传递。例如,事件 \langle t_1, j_1 \rangle 到 \langle t_4, j_4 \rangle 的路径可能经过 t_2 和 t_3 :
\langle t_1, j_1 \rangle \rightarrow \langle t_2, j_2 \rangle \rightarrow \langle t_3, j_3 \rangle \rightarrow \langle t_4, j_4 \rangleA_{t_2 t_1} 数组只记录 t_1 和 t_2 之间的直接边,不能直接捕捉这种跨越多链的传递关系。论文提出了两种策略来解决这个问题,分别对应完全动态和纯增量设置:
Fully Dynamic CSSTs
支持插入、删除。
每次查询进行传递闭包求全源最短路,线段树查询复杂度 \mathcal O(\min(\log n, d)) ,查询总复杂度 \mathcal O(k^3 \min(\log n, d)) 。
另外地,如果使用动态开点,更新复杂度可以降为 \mathcal O(\max(\log \delta, \min(\log n, d))) ,其中 \delta 是最大出度(交叉链密度)。
Incremental CSSTs
仅支持插入。
A_{t_2 t_1} 数组不再只存储直接边,而是直接存储所有传递可达性。也就是说,如果 \langle t_1, j_1 \rangle \rightarrow^* \langle t_2, j_2 \rangle ,那么 A_{t_2 t_1}[j^\prime_1] \le j_2 对于某个 j^\prime_1 \ge j_1 成立。这样查询直接在线段树查询,复杂度 \mathcal O(\min(\log n, d)) 。
这时候插入需要维护传递闭包,论文提出了一个扩散的过程(虽然我觉得就是朴素地更新):
- 对于所有可能的起始链 t^\prime_1 \in [k] ,找到 \langle t_1, j_1 \rangle 在 t^\prime_1 中的最晚前驱 ⟨t^\prime_1, j^\prime_1⟩
- 对于所有可能的目标链 t^\prime_2 \in [k] ,找到 \langle t_2, j_2 \rangle 在 t^\prime_2 中的最早后继 ⟨t^\prime_2, j^\prime_2⟩
- 然后,对于每一对 (⟨t^\prime_1, j^\prime_1⟩,⟨t^\prime_2, j^\prime_2⟩) ,检查是否已经存在一条路径。如果没有,将在线段树上将新的传递边 ⟨t^\prime_1, j^\prime_1⟩\to⟨t^\prime_2, j^\prime_2⟩ 插入到相应的 A_{t^\prime_2 t^\prime_1} 数组中。
这个过程会遍历 \mathcal O(k^2) 对链,在线段树上的操作都是 \mathcal O(\min(\log n, d)) ,所以总插入复杂度为 \mathcal O(k^2 \min(\log n, d)) 。
性能测试
横向比较了:
Graphs标准图表示。VCs标准向量时钟表示。STs基于普通线段树。
CSSTs 在大多数情况下优于 VCs 和 STs,尤其是在非流式或需要删除操作的场景。性能提升主要归因于其高效处理稀疏性,这不仅减少了运行时间,还降低了内存占用,使其能够处理 VCs 和 STs 因内存不足而失败的基准测试。在 C11 数据竞争检测等少数场景中,VCs 在没有显著传播的更新操作下表现更好,因为其更新成本接近 \mathcal O(1) 。但在需要传播的场景中,CSSTs 仍占优势。
后记
这个怎么感觉就只是在前人的线段树上加了点小 trick 呀(
发表信息:ASPLOS’24
作者信息:Hünkar Can Tunç, Ameya Prashant Deshmukh, Berk Cirisci, Constantin Enea, and Andreas Pavlogiannis.
关键词:并发分析, Happens-Before, 偏序, 动态可达性, 线段树
好难哦,看不懂